
MapR被HPE收购,Hadoop的未来在哪里? 原创
至顶网软件与服务频道消息: 几天前,国外媒体传出消息,HPE宣布收购MapR 的资产,收购金额未对外公开。两个月前,MapR就已经陷入财务困境,对外表示再没有融资将面临倒闭的命运。此番被HPE收购也算是一个相对圆满的结局。
作为Hadoop三巨头之一,MapR落得今日境地也着实让人唏嘘,而另外两兄弟Cloudera和Hortonworks情况也并不比MapR强太多。去年10月份,Cloudera和Hortonworks已经宣布平等合并,Cloudera以股票方式收购Hortonworks,Cloudera股东最终获得合并公司60%的股份。这笔交易的背后其实是Hadoop市场无法维持两家公司的竞争。
真是此一时彼一时。曾经,旺盛的大数据市场需求让人们非常看好Hadoop的未来。爆发性增长的数据、人们对数据价值的普遍认可,推动着大数据市场的快速增长,建立在开放架构上的Hadoop,大大降低了大数据的门槛,得到了市场的追捧,再加上有Google和Yahoo两大巨头的背书,这促成了众多创业公司的成立。Cloudera、Hortonworks、MapR就是其中最有影响的三个初创公司,也被称为Hadoop三巨头。2008年Cloudera成立于,2009年MapR 成立,2011年Hortonworks 成立。
当时人们普遍看好Hadoop的未来,这些公司的早期融资也非常顺利。特别是2014年,Hadoop行业迎来高光时刻,Hortonworks成功上市,当时Cloudera也是风投正劲,获得Intel 7.5亿美元的投资,Google、Dell公司老总Mike Dell的私人投资基金跟投。当时,Cloudera的总估值达到41亿美元,成为当时未上市的那些大数据公司里面最为闪耀的公司。据统计,上市前Cloudera获得了超过10亿美元的融资,Hortonworks 获得了2.48亿美元融资,MapR一直没有上市,先后融资也近3亿美元。
希望很美好,现实很骨干,尽管大数据市场很热,Hadoop的需求看涨,但无论是Cloudera、Hortonworks、MapR都没有如期成长。Hortonworks在2014年的IPO首先IPO成功,但之后一蹶不振,跌跌不休。3年后Cloudera上市,市值只有19亿美元,不到高峰时期41亿估值的一半,此后股价也没有太多起色。
IDC曾预测,到2020年大数据和分析的收入预计将达到2030亿美元。市场在为什么经营不利?这几家公司经营困难背后的很大一部分原因在于,市场变化太快,云改变了市场需求。
一个主要原因是企业上云。企业上云之后,数据的分析自然地也会转移到云上,而云服务商纷纷提供了各种经济好用的Hadoop的服务,比如AWS的Elastic Map Reduce(EMR), 这些都是完全集成的产品,具有较低的购置成本并且更便宜,Hadoop产品需求和服务需求被分流在所难免。另一方面,
另一个原因是开源软件企业经营不容易,需要公司管理者非常高的经营智慧。开源走的是软件免费和服务收费,如果软件好用,意味着服务需求低;而软件太复杂,实施维护成本就高,公司很难做大。到目前为止,也只有红帽把这样的业务模式玩转了。
显然,虽然Cloudera、Hortonworks、MapR所代表的以Hadoop为主营业务的公司经营困难,但并不能认为市场不需要Hadoop了,市场对Hadoop需求仍然存在,比如,对于非结构化的海量数据存在HDFS依然是首要候选,Hadoop仍然是大数据市场的主要工具。对于这个行业的创业者而言,现状最需要思考的是如何在这个行业找到自己的价值定位,而不能光蹭热度。
好文章,需要你的鼓励

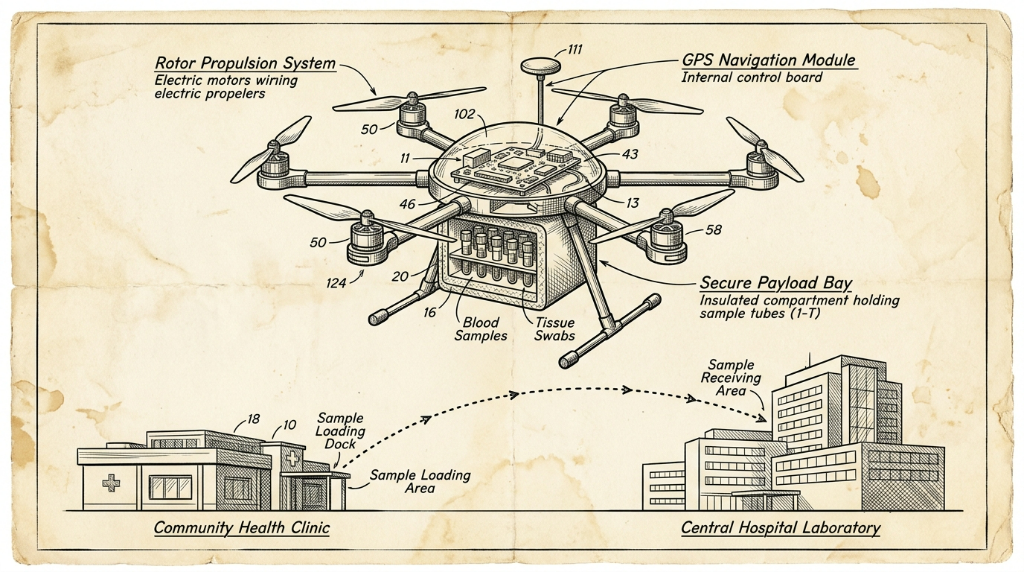
英国NHS无人机快递医疗样本服务正式落地伦敦
英国国家医疗服务(NHS)正将无人机纳入常规医疗物流体系。自今年2月起,无人机每天在雷恩斯公园和圣乔治医院之间运送血液等诊断样本,飞行仅需3分钟,比公路运输快约85%,且碳排放减少高达98%。目前已有逾2000名患者受益。NHS计划将该服务扩展至圣赫利尔、克罗伊登等多家医院,最终惠及约180万名患者。该网络由英国医疗初创公司Apian与谷歌旗下Wing合作运营。
Explyt团队打造的代码智能体评测新标准:光靠“通过/失败“根本不够用
AgentLens是Explyt公司联合俄罗斯学术机构开发的AI编程助手评测基准,通过分析完整人机交互轨迹而非仅看最终结果,从五个维度评估代码智能体的真实表现。
Aetina宣布支持英伟达Jetson T3000和T2000 AI模块
边缘AI计算厂商Aetina宣布,将在其DeviceEdge AIE-KT风冷系列和新款AIE-PT无风扇平台上支持英伟达全新Jetson T3000和T2000模块。T3000基于Blackwell GPU,最高提供865 FP4 TFLOPS算力,功耗70W;T2000则提供400 FP4 TFLOPS,面向视觉AI代理和自主移动机器人等场景。两款模块预计2027年第一季度上市,支持Nemotron、Cosmos 3等英伟达AI软件生态。
机器人的“触觉觉醒“:韩国梨花女子大学如何让小型AI模型在不忘记视觉的前提下学会“感受“材质
韩国梨花女子大学提出Splash框架,通过识别AI模型中的"休眠参数"并只在其中训练触觉能力,让小型多模态AI在学会感知材质触感的同时,完整保留原有视觉语言推理能力。
2019
08/09
09:26
分享
点赞

WAIC2026 现场直击:开普勒顶流人气王,麒麟系列火爆出圈
面壁智能将密度定律带入具身智能
龙磁科技拟投3.58亿元扩建越南永磁铁氧体基地
首创一层Scale-up网络256卡全互联,摩尔线程MTT C256超节点为万卡及十万卡级集群夯实底座
从高血压诊疗入手,北京安贞医院让医疗大模型走出聊天框
西门子肖松:以场景为牵引,推动工业AI从单点实效迈向生产力跃迁
打造Token极致性价比 新华三震撼亮相2026世界人工智能大会
机器人管家系统上线!傅利叶携多款康养陪伴新品方案亮相WAIC 2026
赛那德“ 自主作业机器人天团” 登陆 WAIC:iLoabot-X+模型双升级,秀出具身场景落地硬实力
西门子Eigen工程智能体中国首发首展,荣获2026 WAIC SAIL之星奖
NVIDIA Cosmos 推动物理 AI 前沿发展
PPIO亮相WAIC 2026:发布智能模型网关,打造面向Agent时代的智能Token工厂
