
Meta研究人员做出AI新尝试:教机器人无需地图或训练实现物理导航
Meta Platforms公司人工智能部门日前表示,他们正在教AI模型如何在少量训练数据支持下学会在物理世界中行走,目前已经取得了快速进展。
这项研究能够显著缩短AI模型获得视觉导航能力的时间。以前,实现这类目标要需要利用大量数据集配合重复“强化学习”才能实现。
Meta AI研究人员表示,这项关于AI视觉导航的探索将给虚拟世界带来重大影响。而项目的基本思路并不复杂:帮助AI像人类那样,单纯通过观察和探索实现在物理空间导航。
Meta AI部门解释道,“比如,如果要让AR眼镜指引我们找到钥匙,就必须想办法帮助AI理解陌生的、不断变化的环境布局。毕竟这是非常细化的小需求,不可能永远依赖于极占算力资源的高精度预置地图。人类不需要了解咖啡桌的确切位置或长度就能不产生任何碰撞、轻松绕着桌角走动。”
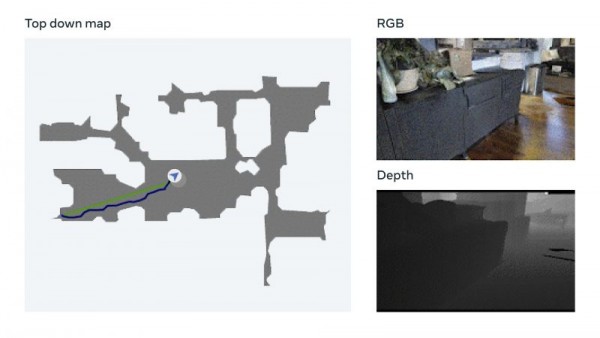
为此,Meta决定将精力集中在“具身AI”身上,即通过3D模拟中的交互机制训练AI系统。在这一领域,Meta表示已经建立起一套值得期待的“点目标导航模型”,无需任何地图或GPS传感器即可在新环境中导航。
该模型使用一种名为视觉测量的技术,允许AI根据视觉输入跟踪自身当前位置。Meta表示,这项数据增强技术能够快速训练出有效的神经模型,且无需人工数据注释。Meta还提到,他们已经在自家Habitat 2.0具身AI训练平台(利用Realistic PointNav基准任务运行虚拟空间模拟)上完成了测试,成功率达到94%。
Meta方面解释道,“虽然我们的方法还没有完全解决数据集中的所有场景,但这项研究已经初步证明,现实环境的导航能力不一定需要显式映射来实现。”
为了在不依赖地图的情况下进一步完善AI导航训练,Meta建立了一套名为Habitat-Web的训练数据集,其中包含10万多种由人类演示的不同对象-目标导航方法。通过运行在网络浏览器上的Habitat模拟器就能顺利接入Amazon.com的Mechanical Turk服务,用户能够以远程方式安全操作虚拟机器人。Meta表示,由此产生的数据将作为训练素材,帮助AI代理获得“最先进的结果”。扫视房间了解整体空间特点、检查角落是否有障碍物等,都是值得AI向人类学习的高效对象搜索行为。
此外,Meta AI团队还开发出所谓“即插即用”模块化方法,可以通过一套独特的“零样本体验学习框架”帮助机器人在多种语义导航任务和目标模式中实现泛化。通过这种方式,AI代理在缺少资源密集型地图和训练的前提下仍可获得基本导航技能,无需额外调整即可在3D环境中执行不同任务。
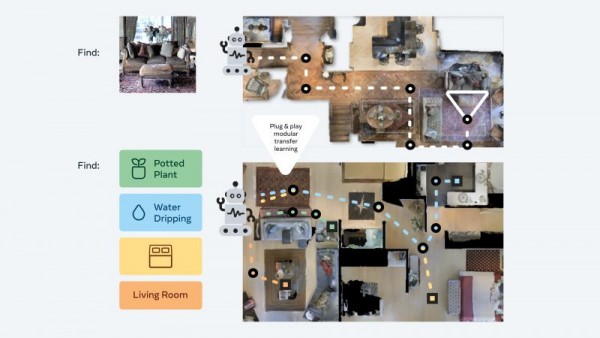
Meta公司解释道,这些代理在训练中会不断搜索图像目标。它们会收到一张在环境中随机位置拍摄的照片,然后通过自主导航尝试找到拍摄点位。Meta研究人员们表示,“我们的方法将训练数据削减至1/12.5,成功率则比最新的迁移学习技术还高出14%。”
Constellation Research公司分析师Holger Mueller在采访中表示,Meta的这项最新进展有望在其元宇宙发展计划中发挥关键作用。他认为,如果未来虚拟世界能够成为常态,那AI必须有能力理解这个新空间,而且理解的成本还不能太高。
Mueller补充道,“AI理解物理世界的能力需要由基于软件的方法获得扩展。Meta目前走的就是这条路,而且在具身AI方面取得了进步,开发出无需训练即可自主理解周边环境的软件。我很期待看到这方面成果在实践层面的早期应用。”
这些现实用例可能已经离我们不远了。Meta公司表示,下一步计划就是把这些成果从导航推进到移动操作,开发出能够执行特定任务的AI代理(比如识别出钱包并将其交还给主人)。
好文章,需要你的鼓励

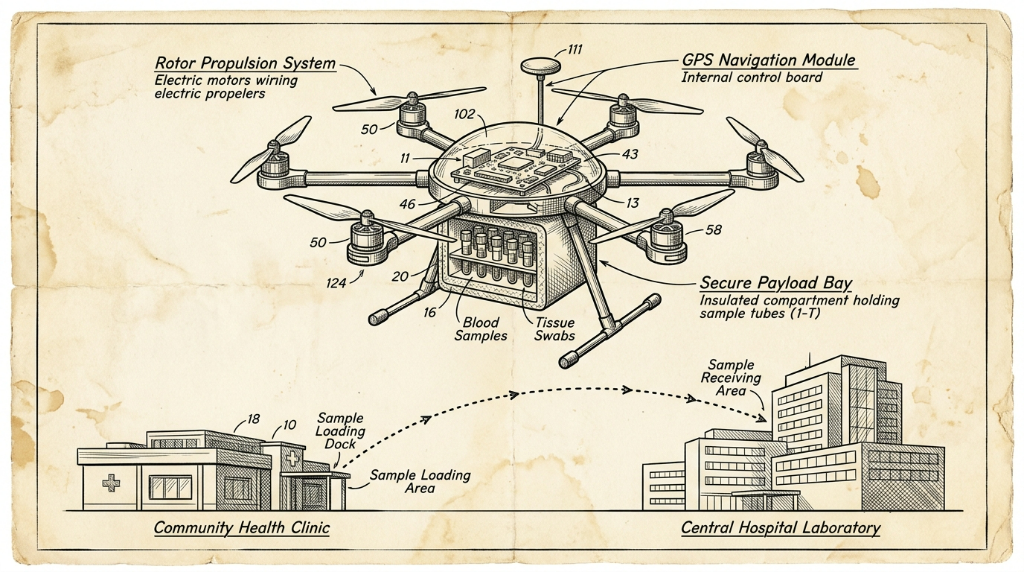
英国NHS无人机快递医疗样本服务正式落地伦敦
英国国家医疗服务(NHS)正将无人机纳入常规医疗物流体系。自今年2月起,无人机每天在雷恩斯公园和圣乔治医院之间运送血液等诊断样本,飞行仅需3分钟,比公路运输快约85%,且碳排放减少高达98%。目前已有逾2000名患者受益。NHS计划将该服务扩展至圣赫利尔、克罗伊登等多家医院,最终惠及约180万名患者。该网络由英国医疗初创公司Apian与谷歌旗下Wing合作运营。
Explyt团队打造的代码智能体评测新标准:光靠“通过/失败“根本不够用
AgentLens是Explyt公司联合俄罗斯学术机构开发的AI编程助手评测基准,通过分析完整人机交互轨迹而非仅看最终结果,从五个维度评估代码智能体的真实表现。
Aetina宣布支持英伟达Jetson T3000和T2000 AI模块
边缘AI计算厂商Aetina宣布,将在其DeviceEdge AIE-KT风冷系列和新款AIE-PT无风扇平台上支持英伟达全新Jetson T3000和T2000模块。T3000基于Blackwell GPU,最高提供865 FP4 TFLOPS算力,功耗70W;T2000则提供400 FP4 TFLOPS,面向视觉AI代理和自主移动机器人等场景。两款模块预计2027年第一季度上市,支持Nemotron、Cosmos 3等英伟达AI软件生态。
机器人的“触觉觉醒“:韩国梨花女子大学如何让小型AI模型在不忘记视觉的前提下学会“感受“材质
韩国梨花女子大学提出Splash框架,通过识别AI模型中的"休眠参数"并只在其中训练触觉能力,让小型多模态AI在学会感知材质触感的同时,完整保留原有视觉语言推理能力。
2022
06/17
17:55
分享
点赞

WAIC2026 现场直击:开普勒顶流人气王,麒麟系列火爆出圈
面壁智能将密度定律带入具身智能
龙磁科技拟投3.58亿元扩建越南永磁铁氧体基地
首创一层Scale-up网络256卡全互联,摩尔线程MTT C256超节点为万卡及十万卡级集群夯实底座
从高血压诊疗入手,北京安贞医院让医疗大模型走出聊天框
西门子肖松:以场景为牵引,推动工业AI从单点实效迈向生产力跃迁
打造Token极致性价比 新华三震撼亮相2026世界人工智能大会
机器人管家系统上线!傅利叶携多款康养陪伴新品方案亮相WAIC 2026
赛那德“ 自主作业机器人天团” 登陆 WAIC:iLoabot-X+模型双升级,秀出具身场景落地硬实力
西门子Eigen工程智能体中国首发首展,荣获2026 WAIC SAIL之星奖
NVIDIA Cosmos 推动物理 AI 前沿发展
PPIO亮相WAIC 2026:发布智能模型网关,打造面向Agent时代的智能Token工厂
最热门的 AI 模型:它们的功能和使用方法
这款古怪的 AI 智能手机可以创建你的数字分身
Faireez 获 750 万美元融资,为租赁市场提供 AI 驱动的酒店式管家服务
Broadcom 大获全胜:70% 大型 VMware 客户购买其最全面解决方案
Peer 获得1050万美元元宇宙引擎投资,推出3D个人星球功能
获 3000 万美元融资,Crogl 发布面向安全分析师的全新 AI "钢铁侠战衣"
Turing 获得 1.11 亿美元融资,估值达到 22 亿美元,为 OpenAI 等大语言模型公司提供关键代码支持
Tavus 推出系列 AI 模型,实现实时人脸交互技术突破
Welevel 获得 570 万美元融资,革新程序化游戏开发
AI 驱动的卓越运营:企业如何通过人人可及的流程智能提升成功
