
孤独九剑|剑指自动化运维难题
至顶网软件频道消息:在笑傲江湖中,独孤九剑是一种很厉害、适合实战打架、并且练起来不疼的武功。
为什么厉害呢?独孤九剑把人能做的动作全部拆解,透过分析对手的目前姿势推测将出的动作有哪些?根据对手部位、肌肉的动作征兆,推算TA下一步只能是什么招式?这就是老风同志一再强调的“料敌机先”。而独孤九剑“以无招胜有招”的剑理,实际上建立在天下众多招数基础上,行云流水。临敌之时,剑招层出不穷,随心所欲,岂能不胜?
IT运维麻烦多
在IT江湖,运维是个大难题。
能够接下大型数据中心运维工作的公司,那必须是经验丰富、人马众多的主儿。比如说,大型银行的数据中心,各种各样操作系统的总量,通常上千,有的甚至以万计(UNIX、各种Linux、少量Windows)。在运维中,各种各样的系统和网络设备、应用、虚拟化平台上的各种问题处理、维护、更新、割接等,都需要运维人员处理。
在这种情况下,光靠运维工程师大侠武功高、火力猛,有时候是不够的。万一敲rm命令的时候,目录(/)之前的小点要是没敲出来,那绝对是要泪奔的。况且,大侠就是武功高、没漏洞,像萧峰同志那样。但万一遇上聚侠庄里各式各样的门派、各种不同的武功高手凑在一块,并且数量超级多,那不是也会抓瞎么?
因此,运维大侠除了经验丰富、武功高,还需要能够帮助TA在运维中秒杀一片的自动化运维工具。并且这个工具的适应面要广,不能只适用某一种Linux,而是各种UNIX、Linux、Windows、网络设备、虚拟化、应用、甚至云平台都成。其次,这个工具要安全。越是强大的武器,越不能走火,否则死得更惨,是不是?
所以,需要一款又强大有安全的自动化运维工具。这个工具必须像独孤九剑那样,针对各种运维中各种各样的问题都有招数破解(目前我们已经积累了超过几千种运维问题、操作的破解招数),并且行之有效、安全可控。这样才能在IT运维中才能做到料敌先机、招招进攻,实现主动运维、自动化运维。
它,简单而强大、灵活而可控、兼顾传统和互联网企业、并且经验丰富;
它是企业大幅提高数据中心运维水平、提升业内竞争力的必备利器;
它是Github最受关注、最受欢迎自动化运维工具;
它就像金庸武侠中的独孤九剑,尽破各路IT运维难题。
它,就是Ansible Tower!
前言
上海均凡信息科技有限公司是红帽Ansible Tower的合作伙伴。本系列介绍Ansible Tower的文章由均凡与红帽工程师共同完成。
本系列文章一共分为四篇:
1. 不一样的Ansible(点击查看)
2. 可控的运维工具Tower
3. 互联网的运维工具
4. 经验丰富的Ansible Tower
灵活而可控的Ansible Tower
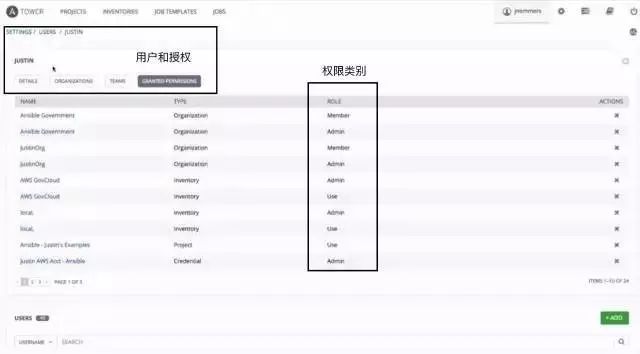
你可能已经熟知Ansible的自动化能力。然而,越是强大的自动化平台,越是要监管,以防误操作。而红帽Ansible Tower则是:
·简约的按角色/权限/控制的的集中自动化平台;
·与操作/日志/审计/版本控制结合的一个数据中心自动化管控平台;
·Ansible Tower本质上是Ansible的统一管理界面,类似虚拟化中的管理平台;
·它可以和AD、LDAP等认证方式做对接、通过统一图形化界面直观地看到被管系统的状态。
Ansible Tower既能充分发挥Ansible这类自动化工具原本的强大执行能力,对其能力按角色进行控制,同时能将事后报表和审计功能融入,做到符合传统数据中心的运维规范。
图1:任务执行的报表

图2:作业执行过程中的日志追踪
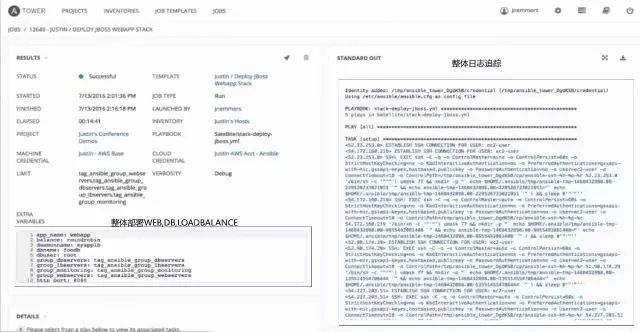
图3:角色和执行的脚本的权限匹配
Ansible Tower的操作日志还可以与数据中心的CMDB对接,便于用户从整个数据级别对Ansible Tower的自动化运维操作进行统一管理和监控。
因此,Ansible Tower,不仅给企业带来的一个自动化的数据中心,更是一个安全放心的数据中心。
来源:业界供稿
好文章,需要你的鼓励



明尼苏达大学最新研究颠覆认知:训练AI大模型,只需动其中一层就够了?
这项来自明尼苏达大学等机构的研究发现,大语言模型在强化学习后训练中,只需训练中间少数几层即可匹配甚至超越全参数训练效果,且这一规律跨模型、跨任务高度稳定,为更高效的AI训练策略提供了新思路。


台湾大学与NVIDIA揭秘:你的声音正在悄悄改变AI对你的判断
本文介绍VIBE框架,一套通过开放式任务评估大型音频语言模型声音诱发偏见的系统,测试12个模型后发现每个模型均存在显著性别或口音偏见。
2017
03/15
09:57
分享
点赞

NVIDIA Cosmos 推动物理 AI 前沿发展
PPIO亮相WAIC 2026:发布智能模型网关,打造面向Agent时代的智能Token工厂
端侧感知、私有闭环、量子协同, NVIDIA全栈异构计算范式“接管”实体产业底座
边缘智算筑基、全栈软硬协同,研华科技将AI带进产业闭环
千问AI眼镜将升级为智能体眼镜:能灵活调用Skill和Agent,能全天候感知
对话Moonix郭于晨:先让用户戴上“眼镜”,再让“AI”记录世界
亮相WAIC 2026,临床实证赋能康养升级 无芯科技定义AI疗愈新范式
生态覆盖持续扩散,一文看懂各行业企业鸿蒙化转型进度
WAIC亮出集群协作真功夫,优艾智合领跑工业具身智能规模化
脑部植入物助瘫痪男子重获进食与饮水能力
能源公司IPO融资创21世纪新高,押注AI基础设施热潮
Apple Intelligence获中国监管批准,携手阿里巴巴与百度正式进入中国市场
